




VMC850B CNC мошини Freze, маркази мошини амудӣ
Хусусиятҳои маҳсулот



1. Дастури умумӣ
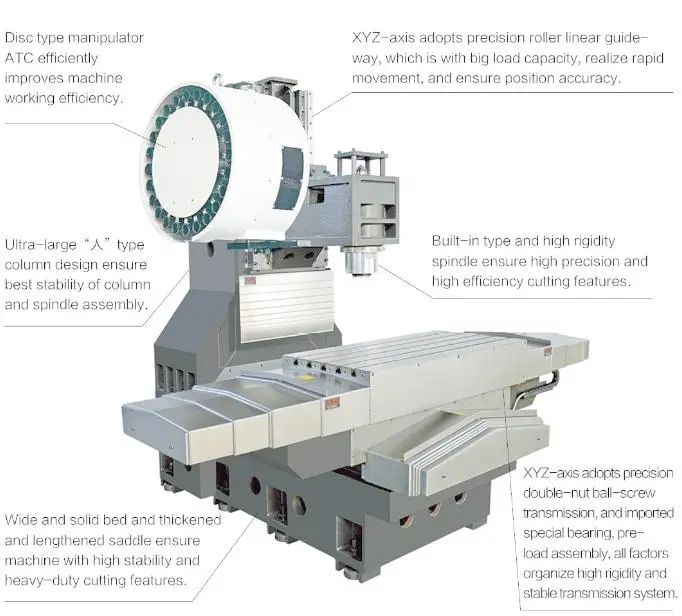
Ин мошин бо тарҳбандии чаҳорчӯбаи амудӣ тарҳрезӣ шудааст. Сутун ба корпуси мошин насб карда шудааст, слайдҳои қуттии шпиндель дар сутуни ҳаракати меҳвари Z, слайдҳои зин дар бадани мошин, ки ҳаракати меҳвари Y, слайдҳои мизи корӣ дар болои зинро ташкил медиҳанд, ҳаракати меҳвари X. Се меҳвар ҳама роҳнамои хатӣ бо суръати баландтари ғизо ва дақиқии баландтар мебошанд. Мо аз оҳани баландсифати хокистарии хокистарӣ барои бадани мошин, сутун, зин, мизи корӣ, қуттии шпиндель бо технологияи регҳои қатрон ва табобати 2 маротиба пиршавӣ барои бартараф кардани фишори боқимондаи дохилии мавод истифода мебарем. Ин қисмҳо ҳама аз ҷониби нармафзори SolidWorks оптимизатсия карда шудаанд, ки сахтӣ ва устувории на танҳо барои ин қисмҳо, балки мошинро беҳтар мекунад. Он инчунин деформатсия ва ларзишро, ки ҳангоми буридан ба вуҷуд омадааст, бозмедорад. Қисмҳои муҳим ҳама аз бренди машҳури ҷаҳонӣ ворид карда мешаванд, то мошинро бо устуворӣ ва устувории баландтар созанд. Ин мошин метавонад ба раванди фрезеркунӣ, пармакунӣ, рахбаркунӣ, дилгиркунӣ, рейка кардан, ламс кардан ноил шавад ва одатан барои ҳарбӣ, истихроҷи маъдан, мошинсозӣ, қолаб, асбобсозӣ ва дигар соҳаҳои коркарди механикӣ истифода мешавад. Онро барои ҳама гуна моделҳои дақиқи баланд ва бисёр равандҳо истифода бурдан мумкин аст. Он барои истеҳсоли хурд ва миёна, гуногунҷабҳа хуб аст, инчунин он метавонад ба хатти истеҳсоли автоматӣ гузорад.
2.Системаи се меҳвар
Се меҳвар ҳама роҳнамои хаттӣ мебошанд ва бо тарҳи фосилаи калон барои дақиқии пойдор. Моторҳои 3 меҳвар мустақиман бо винти тӯби дақиқи баланд тавассути пайвасти фасеҳи холигӣ пайваст карда мешаванд. Ҳар як винти тӯби 3 меҳвар аз винти дакикаи кунҷӣ ва подшипникҳои касбӣ ворид карда мешавад, инчунин мо барои винтҳои тӯб барои дақиқӣ ва дақиқии баландтар шиддат медиҳем. Моторҳои сервои Z-меҳвар дорои функсияи тормози автоматӣ мебошад. Дар ҳолати қатъи барқ, тормози мотор метавонад ба таври худкор тавассути тормоз нигоҳ дошта шавад, то аз гардиши он пешгирӣ кунад, ки дар ҳифзи бехатарӣ нақш мебозад.
3.Воҳиди шпиндель
Шпиндель аз ҷониби истеҳсолкунандаи касбӣ истеҳсол карда мешавад, то дақиқӣ ва устувории баландро таъмин кунад. Подшипникҳои шпиндель аз бренди машҳури подшипникҳои дақиқи ҷаҳонӣ буда, дар ҳолати ҳарорати доимӣ ва бе чанг васл карда шудаанд. Пас аз он, ҳама шпиндельҳо озмоиши мувозинати динамикро анҷом медиҳанд, то мӯҳлат ва эътимоднокӣ дошта бошанд. Он бо системаи муҳофизати давраи ҳавои фишори паст муҷаҳҳаз шудааст, ки ҳавои фишори пастро ба фазои дохилии шпиндель вазида, қабати муҳофизати ҳаворо ташкил медиҳад, то чанг, моеъи хунуккуниро пешгирӣ кунад. шпиндель. Барои ин ҳолат подшипникҳои шпиндель дар зери муҳити ифлоскунанда кор хоҳанд кард, ки ин агрегати шпиндельро муҳофизат мекунад ва мӯҳлати дарозтари шпиндельро муҳофизат мекунад. Суръати шпиндельро дар доираи суръати шпиндель ҳеҷ қадам тағир додан мумкин нест, ки он аз ҷониби рамзи дохилии мотор идора карда мешавад, то бо функсияи самти шпиндель ва ламскунии қатъӣ бошад.
4.Системаи тағир додани асбоб
Иқтидори маҷаллаи асбобҳои стандартии ин мошин 24T буда, дар сутуни паҳлӯ ҷойгир карда шудааст. Ҳангоме ки он асбоб, диски лавҳаи асбобро иваз мекунад ва бо механизми камераи гардонандаи мотор ҷойгир карда мешавад, пас аз расидани шпиндель ба мавқеи тағирёбии асбоб, ATC тағир додани асбобро ба даст меорад ва амали асбобро мефиристад. ATC механизми камераи васлкунанда аст ва шиддати пешакиро ба вуҷуд меорад, пас метавонад гардиши суръати баланд дошта бошад, ки барои зуд ва дуруст иваз кардани асбоб беҳтар аст.
5.Системаи хунуккунӣ
Мошин бо насоси хунуккунии обкашӣ ва зарфи обии иқтидори калон муҷаҳҳаз шудааст. Суръати насоси хунуккунӣ 2 м³/соат аст, то боварӣ ҳосил кунед, ки сардшавии фаровони такрорӣ. Дар сатҳи охири қуттии шпиндель сопло хунуккунӣ мавҷуд аст, ки метавонад сардкунандаи ҳаво ва сардкунандаи обро барои асбоб ва қисмҳои корӣ созад. Барои тоза кардани мошин ва қисмҳои корӣ бо таппончаи пневматикӣ муҷаҳҳаз шудааст.
6. Системаи пневматикӣ
Агрегати пневматикӣ метавонад ифлосиҳо ва намиро дар манбаи газ филтр кунад, то вайроншавӣ ва эрозияи қисмҳои мошинро пешгирӣ кунад. Воҳиди клапани электромагнитӣ барномаро тавассути PLC идора мекунад, то боварӣ ҳосил кунад, ки амалҳои асбоби кушодани шпиндель, шамолдиҳии маркази шпиндель, асбоби фишурдани шпиндель ва хунуккунандаи ҳавои шпиндельро зуд ва дуруст иҷро кардан мумкин аст. Ҳар дафъае, ки асбоби ивазкунандаи шпиндель аз маркази шпиндель ҳавои шаффоф фишор меовард, то сӯрохи даруни шпиндель ва танаи асбобро барои мустаҳкамии баланди комбинатсияи шпиндель ва асбоб тоза кунад. Он мӯҳлати хизмати шпиндельро васеъ мекунад.
7. Муҳофизати мошин
Мо барои мошин сипари стандартии муҳофизати бехатариро истифода мебарем, ки он на танҳо лаппиши моеъи хунуккуниро, балки кори бехатариро муҳофизат карда метавонад. Ҳар як роҳнамо бо сипари муҳофизатӣ муҷаҳҳаз карда шудааст, то порчаи хунуккуниро ба фазои дохилӣ пешгирӣ кунад ва фарсудашавӣ ва эрозияи роҳнамо ва винти тӯбро коҳиш диҳад.
8.Системаи молиданӣ
Роҳнамо ва винти тӯбӣ бо системаи молидании марказӣ ва ҷудокунандаи равғани ҳаҷмӣ дар ҳар гиреҳ муҷаҳҳаз шудаанд, ки метавонанд дар миқдор ва вақтҳои муқарраршуда равған таъмин кунанд, то боварӣ ҳосил кунанд, ки ҳар як рӯйи слайд молидан ва истеҳсоли пасттар аст. Он дақиқӣ ва мӯҳлати дарозтари винти тӯб ва роҳнаморо беҳтар мекунад.
9.Системаи конвейери чип
Мо дастгоҳи стандартии тозакунандаи чипро бо кори осон таъмин мекунем. Шумо инчунин метавонед конвейери чипи винт ё навъи ҳалқаро интихоб кунед.
| Адад | Воҳиди | VMC640L | VMC640LH | VMC850L | VMC1000L |
| Мизи корӣ | |||||
| Андозаи мизи корӣ | mm | 400×900 | 400×900 | 500×1000 | 500×1200 |
| Ковокии T (N×W×D) | mm | 3×18×100 | 3×18×100 | 5×18×100 | 5×18×100 |
| Сафар | |||||
| Сафари меҳвари X | mm | 640 | 640 | 850 | 1000 |
| Сафари меҳвари Y | mm | 400 | 400 | 500 | 500 |
| Сафари меҳвари Z | mm | 400 | 500 | 600 | 600 |
| Диапазони коркард | |||||
| Масофа аз маркази шпиндель то пеши сутун | mm | 440 | 476 | 572 | 572 |
| Масофа аз охири шпиндель то мизи корӣ | mm | 120-520 | 120-620 | 120-720 | 120-720 |
| Андозаи мошин | |||||
| L×W×H | mm | 2200×2100×2500 | 2200×2100×2550 | 2540×2320×2780 | 3080×2320×2780 |
| Вазни мошин | |||||
| Макс. борбардории мизи корӣ | kg | 350 | 350 | 500 | 600 |
| Вазни мошин | kg | 3900 | 4100 | 5200 | 5600 |
| Шпиндель | |||||
| Конуси сӯрохи шпиндель | BT40 | BT40 | BT40 | BT40 | |
| Қувваи шпиндель | kw | 5.5 | 5.5 | 7.5/11 | 7.5/11 |
| Макс. суръати шпиндель | чархзании | 8000/10000 | 8000/10000 | 8000/10000 | 8000/10000 |
| Feed (диски мустақим) | |||||
| Макс. суръати ғизо | мм/дақ | 10000 | 12000 | 12000 | 12000 |
| Суръати интиқоли босуръат (X/Y/Z) | м/дақ | 20/20/10 | 30/30/24 | 32/32/30 | 32/32/30 |
| Видаҳои тӯб (диаметр + сурб) | |||||
| Меҳвари X мехвари тӯб | 3210 | 3212 | 4016 | 4016 | |
| Меҳвари Y | 3210 | 3212 | 4016 | 4016 | |
| Меҳвари Z мехи печдор | 3210 | 4012 | 4016 | 4016 | |
| Маҷаллаи асбобҳо | |||||
| Иқтидори маҷаллаи асбобҳо | T | 16 | 16 | 24 | 24 |
| Вақти тағир додани асбоб | s | 2.5 | 2.5 | 2.5 | 2.5 |
| Аниқии ҷойгиршавӣ (Стандарти миллӣ) | |||||
| Аниқии ҷойгиршавӣ (X/Y/Z) | mm | 0,008 | 0,008 | 0,008 | 0,008 |
| Дурустии ҷойгиркунии дубора (X/Y/Z) | mm | 0,005 | 0,005 | 0,005 | 0,005 |
| НЕ. | Ном | Бренд |
| 1 | Системаи CNC | СИСТЕМАИ Seimens 808D |
| 2 | Моторҳои асосӣ | Маҷмӯи пурраи гардонандаи Siemens, аз ҷумла мотори серво |
| 3 | мотори меҳвари X/Y/Z, ронанда | Seimens |
| 4 | Шарик | Hiwin ё PMI (Тайван) |
| 5 | Подшипник винтдор | NSK (Ҷопон) |
| 6 | Роҳнамои хатӣ | Hiwin ё PMI (Тайван) |
| 7 | Моторҳои шпиндель | POSA/ROYAL (Тайван) |
| 8 | Табдилдиҳандаи гармӣ | Тайпин/Тонгфей (Корхонаи муштарак) |
| 9 | Унсурҳои асосии системаи молиданӣ | Протон (корхонаи муштарак) |
| 10 | Қисмҳои асосии системаи пневматикӣ | AirTAC (Тайван) |
| 11 | Қисмҳои асосии системаи барқ | Шнайдер (Фаронса) |
| 12 | Насоси об | Хитой |





