




Мошини фрезеркунии CNC VMC850B, маркази мошини амудӣ
Хусусиятҳои маҳсулот



1. Дастури умумӣ
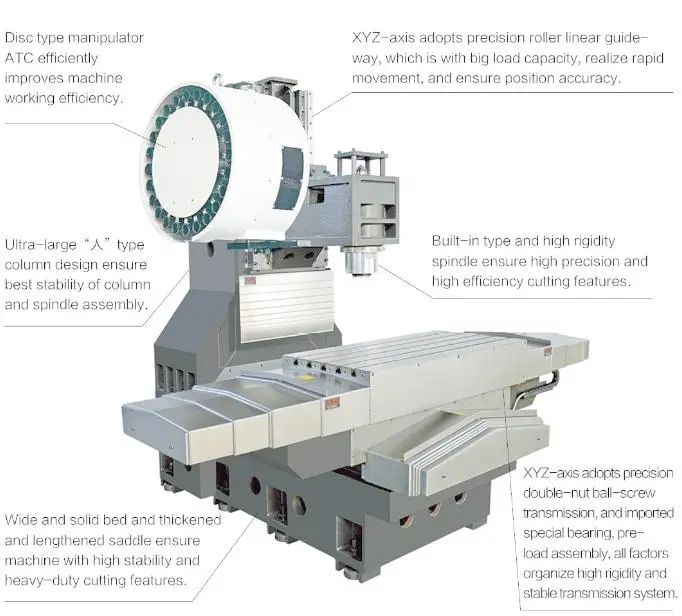
Ин мошин бо тарҳбандии чорчӯбаи амудӣ тарҳрезӣ шудааст. Сутун ба корпуси мошин насб карда шудааст, қуттии шпиндель дар сутун лағжида, ҳаракати меҳвари Z-ро ташкил медиҳад, зин дар корпуси мошин лағжида, ҳаракати меҳвари Y-ро ташкил медиҳад, мизи корӣ дар зин ҳаракати меҳвари X-ро ташкил медиҳад. Се меҳвар ҳама роҳнамои хаттӣ бо суръати баланди ғизодиҳӣ ва дақиқии баландтар мебошанд. Мо аз оҳани рехтагарии хокистарии баландсифат барои корпуси мошин, сутун, зин, мизи корӣ, қуттии шпиндель бо технологияи реги қатрон ва коркарди 2 маротиба пиршавӣ барои бартараф кардани фишори боқимондаи дохилии мавод истифода мебарем. Ҳамаи ин қисмҳо аз ҷониби нармафзори SolidWorks оптимизатсия карда шудаанд, ки сахтӣ ва устувориро на танҳо барои ин қисмҳо, балки барои мошин низ беҳтар мекунад. Инчунин он деформатсия ва ларзишеро, ки аз буридан ба вуҷуд меояд, бозмедорад. Қисмҳои муҳим ҳама аз бренди машҳури ҷаҳонӣ ворид карда мешаванд, то мошинро бо устуворӣ ва устувории баландтар созанд. Ин мошин метавонад раванди фрезеркунӣ, пармакунӣ, рехтагарӣ, пармакунӣ, рехтагарӣ, ламскуниро ба даст орад ва одатан барои саноати ҳарбӣ, истихроҷи маъдан, автомобилсозӣ, қолаб, асбобсозӣ ва дигар соҳаҳои коркарди механикӣ истифода шавад. Онро барои ҳама намуди моделҳои дақиқии баланд ва коркарди хеле зиёд истифода бурдан мумкин аст. Он барои истеҳсоли хурду миёна ва гуногунҷабҳа хуб аст, инчунин онро ба хатти истеҳсолии худкор гузоштан мумкин аст.
2. Системаи се меҳварӣ
Се меҳвар ҳама роҳнамои хаттӣ мебошанд ва бо тарҳи паҳнои калон барои дақиқии пойдор тарҳрезӣ шудаанд. Моторҳои 3 меҳвар мустақиман бо винти тӯбии дақиқи баланд тавассути пайвасткунии чандири бефосила пайваст карда мешаванд. Ҳар як винти тӯбии 3 меҳвар аз винти тӯбии кунҷии дақиқ ва подшипникҳои касбӣ ворид карда мешавад, инчунин мо барои дақиқӣ ва дақиқии баландтар барои винтҳои тӯбӣ пешакӣ шиддат медиҳем. Мотор сервои меҳвари Z функсияи тормозкунии худкор дорад. Дар сурати қатъ шудани барқ, тормозкунии муҳаррик метавонад ба таври худкор аз ҷониби тормоз нигоҳ дошта шавад, то аз гардиши он пешгирӣ карда шавад, ки ин дар ҳифзи бехатарӣ нақш мебозад.
3. Воҳиди шпиндел
Шпиндел аз ҷониби истеҳсолкунандаи касбӣ барои таъмини дақиқии баланд ва сахтӣ истеҳсол карда мешавад. Подшипники шпиндел аз бренди машҳури ҷаҳонӣ буда, дар шароити ҳарорати доимӣ ва набудани чанг васл карда шудааст. Пас аз ин, ҳамаи шпинделҳо барои таъмини мӯҳлати хизмат ва эътимоднокии он аз санҷиши мувозинати динамикӣ мегузаранд. Он бо системаи муҳофизати даври ҳавои фишори паст муҷаҳҳаз шудааст, ки ҳавои фишори пастро ба фазои дохилии шпиндел мепартояд ва қабати муҳофизатии ҳаворо барои пешгирӣ аз ворид шудани чанг ва моеъи хунуккунанда ба шпиндел ташкил медиҳад. Дар ин ҳолат, подшипники шпиндел дар муҳити бе ифлосшавӣ кор хоҳад кард, ки воҳиди шпинделро муҳофизат мекунад ва мӯҳлати хизмати шпинделро дарозтар мекунад. Суръати шпинделро дар доираи суръати шпиндел бидуни қадам тағйир додан мумкин аст, ки аз ҷониби рамзгузории дохилии муҳаррик бо функсияи самти шпиндел ва ламскунии сахт идора карда мешавад.
4. Системаи ивазкунии асбобҳо
Иқтидори стандартии маҷаллаи асбобҳои ин мошин 24T буда, дар сутуни паҳлӯӣ васл карда шудааст. Вақте ки он асбобро иваз мекунад, гардонандаи лавҳаи асбоб ва ҷойгиркунии он бо механизми камони гардонандаи муҳаррик, пас аз расидани шпиндель ба мавқеи иваз кардани асбоб, ATC иваз кардани асбобро анҷом медиҳад ва амали асбобро мефиристад. ATC механизми камони гардонанда буда, пешакӣ шиддат мегирад ва сипас метавонад гардиши суръати баландро анҷом диҳад, ки ин барои иваз кардани зуд ва дурусти асбоб беҳтар аст.
5. Системаи хунуккунӣ
Мошин бо насоси хунуккунии ғарқкунандаи амудӣ ва зарфи об бо иқтидори калон муҷаҳҳаз шудааст. Суръати насоси хунуккунӣ 2 м³/соат аст, то хунуккунии дубораи кофӣ таъмин карда шавад. Дар сатҳи нӯги қуттии шпиндель соплои хунуккунӣ мавҷуд аст, ки метавонад барои асбоб ва қисмҳои корӣ хунуккунандаи ҳаво ва обро истифода барад. Барои тоза кардани мошин ва қисмҳои корӣ бо таппончаи ҳавоӣ муҷаҳҳаз шудааст.
6. Системаи пневматикӣ
Агрегати пневматикӣ метавонад ифлосӣ ва намиро дар манбаи газ филтр кунад, то аз вайроншавӣ ва фарсоиши қисмҳои мошин пешгирӣ кунад. Агрегати клапани электромагнитӣ барномаро тавассути PLC идора мекунад, то боварӣ ҳосил кунад, ки амалҳои асбоби кушодани шпиндель, дамидани маркази шпиндель, асбоби фишурдани шпиндель ва моеъи хунуккунандаи ҳавои шпиндель зуд ва дуруст иҷро карда мешаванд. Ҳар дафъае, ки асбоби иваз кардани шпиндель, ҳавои фишори соф аз маркази шпиндель мевазад, сӯрохи дарунии шпиндель ва пояи асбобро тоза мекунад, то сахтии баланд дар якҷоягӣ бо шпиндель ва асбоб таъмин карда шавад. Ин мӯҳлати кори шпиндельро дароз мекунад.
7. Муҳофизати мошин
Мо барои дастгоҳ сипари стандартии муҳофизатии бехатариро истифода мебарем, ки на танҳо метавонад аз пошидани моеъи хунуккунанда, балки аз кори бехатарӣ низ муҳофизат кунад. Ҳар як роҳи роҳнамо бо сипари муҳофизатӣ муҷаҳҳаз шудааст, то аз ворид шудани моеъи хунуккунанда ва қисми буридашаванда ба фазои дохилӣ пешгирӣ кунад ва фарсудашавӣ ва эрозияи роҳи роҳнамо ва винти кураро кам кунад.
8. Системаи молиданӣ
Роҳнамо ва винти курашакл бо системаи равғандиҳии марказӣ ва дар ҳар як гиреҳ бо ҷудокунандаи равғани ҳаҷмӣ муҷаҳҳаз шудаанд, ки метавонанд равғанро дар миқдор ва вақти муайян таъмин кунанд, то боварӣ ҳосил кунанд, ки ҳар як лағжанда равған молида шудааст ва истеҳсолот камтар аст. Ин дақиқиро беҳтар мекунад ва мӯҳлати кори винти курашакл ва роҳнаморо дарозтар мекунад.
9. Системаи конвейери чипӣ
Мо дастгоҳи стандартии дастӣ барои тоза кардани чипҳоро бо кори осон пешниҳод менамоем. Шумо инчунин метавонед конвейери чипҳои навъи винтӣ ё навъи шарнирро интихоб кунед.
| Ашё | Воҳид | VMC640L | VMC640LH | VMC850L | VMC1000L |
| Мизи корӣ | |||||
| Андозаи мизи корӣ | mm | 400×900 | 400×900 | 500×1000 | 500×1200 |
| Т-ковокии (N×W×D) | mm | 3×18×100 | 3×18×100 | 5×18×100 | 5×18×100 |
| Сафар | |||||
| Ҳаракати меҳвари X | mm | 640 | 640 | 850 | 1000 |
| Ҳаракати меҳвари Y | mm | 400 | 400 | 500 | 500 |
| Саёҳати меҳвари Z | mm | 400 | 500 | 600 | 600 |
| Диапазони коркард | |||||
| Масофа аз маркази шпиндель то пеши сутун | mm | 440 | 476 | 572 | 572 |
| Масофа аз нӯги шпиндель то мизи корӣ | mm | 120-520 | 120-620 | 120-720 | 120-720 |
| Андозаи мошин | |||||
| Д × П × Б | mm | 2200×2100×2500 | 2200×2100×2550 | 2540×2320×2780 | 3080×2320×2780 |
| Вазни мошин | |||||
| Борбардории максималии мизи корӣ | kg | 350 | 350 | 500 | 600 |
| Вазни мошин | kg | 3900 | 4100 | 5200 | 5600 |
| Шпиндел | |||||
| Конуси сӯрохи шпиндель | BT40 | BT40 | BT40 | BT40 | |
| Қувваи шпиндель | kw | 5.5 | 5.5 | 7.5/11 | 7.5/11 |
| Суръати максималии spindle | rpm | 8000/10000 | 8000/10000 | 8000/10000 | 8000/10000 |
| Фидер (ронандаи мустақим) | |||||
| Суръати максималии ғизодиҳӣ | Мм/дақ | 10000 | 12000 | 12000 | 12000 |
| Суръати зуди ғизодиҳӣ (X/Y/Z) | м/дақ | 20/20/10 | 30/30/24 | 32/32/30 | 32/32/30 |
| Винти курашакл (диаметр + сурб) | |||||
| Винти тӯби меҳвари X | 3210 | 3212 | 4016 | 4016 | |
| Винти тӯбии меҳвари Y | 3210 | 3212 | 4016 | 4016 | |
| Винти тӯби меҳвари Z | 3210 | 4012 | 4016 | 4016 | |
| Маҷаллаи асбобҳо | |||||
| Иқтидори маҷаллаи асбобҳо | T | 16 | 16 | 24 | 24 |
| Вақти иваз кардани асбоб | s | 2.5 | 2.5 | 2.5 | 2.5 |
| Дақиқии ҷойгиркунӣ (стандарти миллӣ) | |||||
| Дақиқии ҷойгиркунӣ (X/Y/Z) | mm | 0.008 | 0.008 | 0.008 | 0.008 |
| Дақиқии аз нав ҷойгиркунӣ (X/Y/Z) | mm | 0.005 | 0.005 | 0.005 | 0.005 |
| НЕ. | Ном | Бренд |
| 1 | Системаи CNC | СИСТЕМАИ Seimens 808D |
| 2 | Мотори асосӣ | Маҷмӯи пурраи диски Siemens, аз ҷумла муҳаррики серво |
| 3 | Мотор, меҳвари X/Y/Z, ронанда | Сейменс |
| 4 | Винт | Ҳивин ё PMI (Тайван) |
| 5 | Подшипники винтӣ | NSK (Ҷопон) |
| 6 | Роҳнамоҳои хаттӣ | Ҳивин ё PMI (Тайван) |
| 7 | Мотори шпиндель | POSA/ROYAL (Тайван) |
| 8 | Мубодилгари гармӣ | Taipin/Tongfei (Корхонаи муштарак) |
| 9 | Қисмҳои асосии системаи равғанкашӣ | Протон (Корхонаи муштарак) |
| 10 | Қисмҳои асосии системаи пневматикӣ | AirTAC (Тайван) |
| 11 | Қисмҳои асосии системаи барқӣ | Шнайдер (Фаронса) |
| 12 | Насоси об | Чин |
Категорияҳои маҳсулот
-

Мошини пармакунии радиалии Z3... Табдили басомад
-

Токарии дастӣ бо бистари фосилаи C6240C, токарии металлӣ бо n ...
-

Дастгоҳи фрезеркунии яксутунии X4020HD Плано
-

Дастгоҳи токарии CNC бо кати каҷ CK6130S Falco бо 3 меҳвар
-

Мошини фрезеркунии пармакунии хурди каммасрафи энергия ...
-

Мошини фрезеркунии универсалии навъи RAM X5750